For years, enabling stock adaptive cruise control meant handing speed control to a system built on fixed rules, preset following distances, and limited context. Even when openpilot Experimental mode improved on that experience, the longitudinal policy was still trained in a classical hand-coded simulator that could only model small deviations.
That limitation showed up in the real world. Older models did not always settle confidently on a comfortable highway cruising speed, and users could feel that indecision at speed.
openpilot 0.11 changes that with WMI, a world model trained using a learned simulator. The new system is powered by a 2-billion-parameter neural network that learned to simulate driving directly from data: no hand-coded geometry, no rule-based physics, just 2.5 million minutes of fleet driving video used to teach a transformer what the world looks like and how it should evolve when the car steers or brakes.
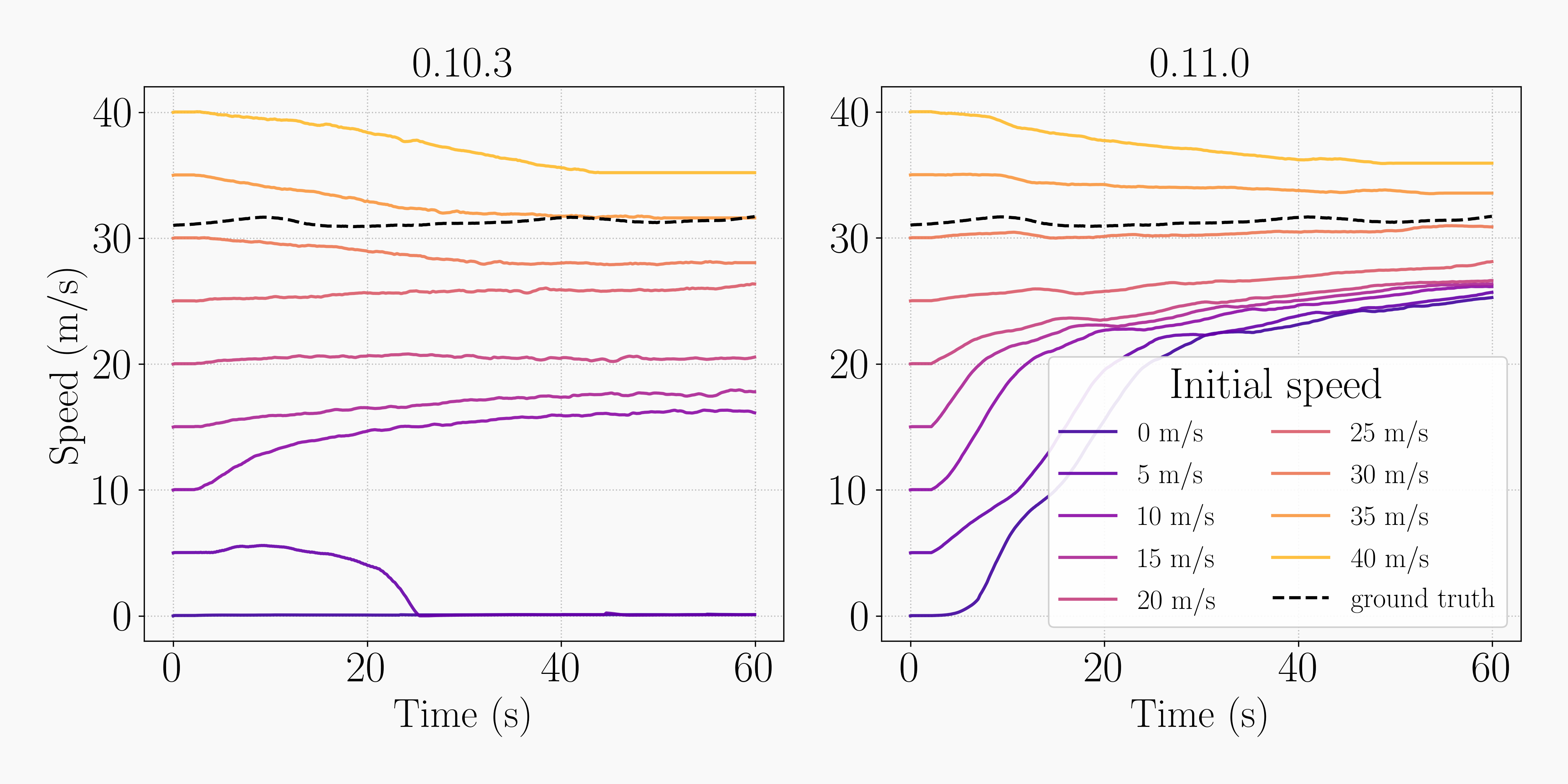
The comma team tested the new model by initializing simulation runs at different speeds and letting the policy converge to its preferred highway pace. Version 0.11 behaves much more confidently and consistently than earlier releases.
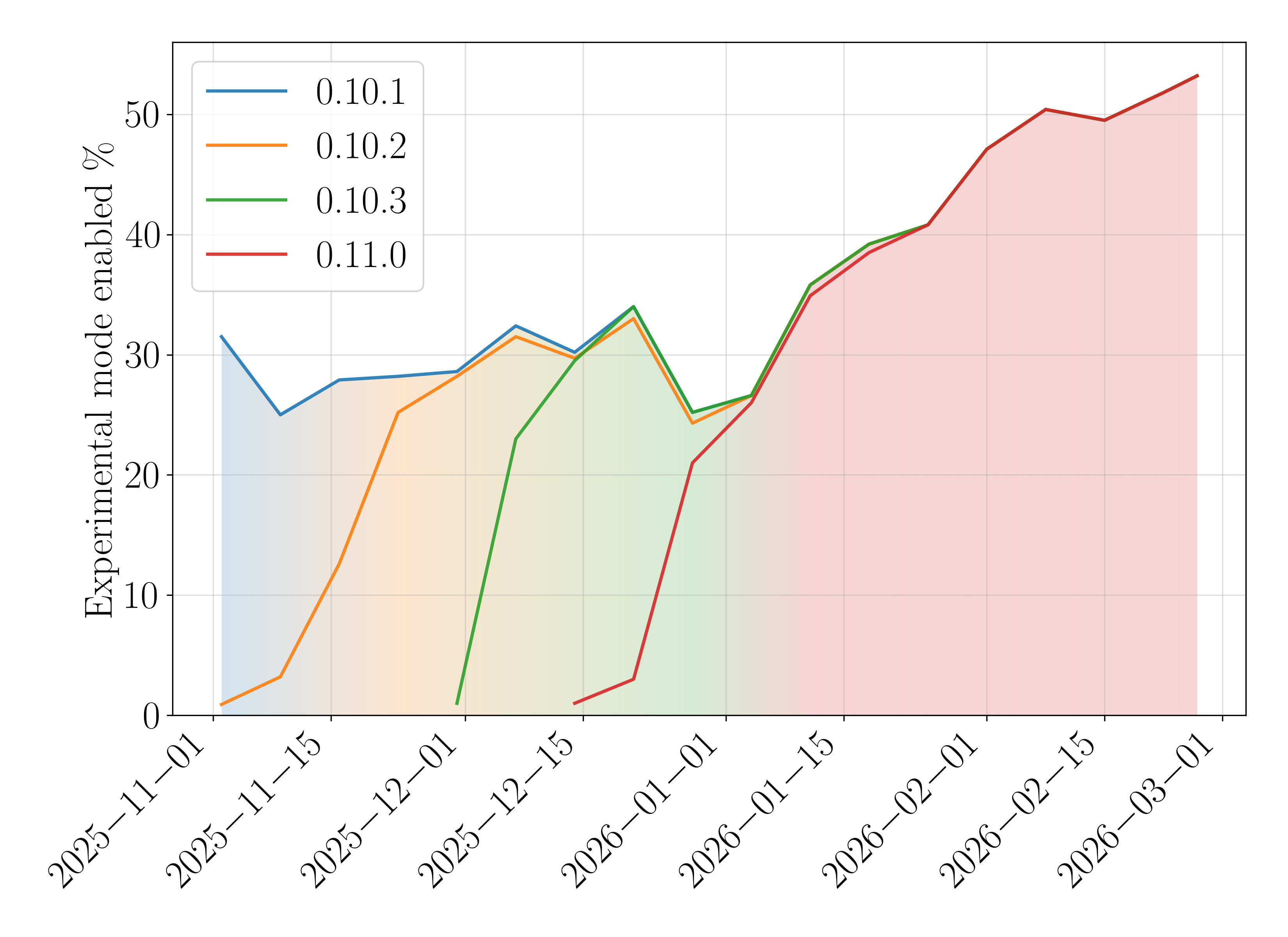
The practical signal is even more important: after the model landed in openpilot nightly on January 19, 2026, users on nightly preferred Experimental mode over stock ACC by a wide margin. That is the highest Experimental mode adoption comma has seen for an openpilot release.
In plain terms, drivers are increasingly turning off the factory cruise controller and trusting the full end-to-end comma model instead. That is a real-world milestone, not just a benchmark win.
Stock ACC
Your car's built-in adaptive cruise control.
Rule-based and limited to what the manufacturer explicitly programmed, with fixed following and speed behavior.
Old Experimental mode
A better openpilot driving model with a simulator bottleneck.
Longitudinal behavior improved over stock ACC, but highway speed selection could still feel inconsistent because training depended on a hand-coded simulator.
openpilot 0.11 Experimental mode
Full end-to-end planning and speed control.
The model now plans and controls speed using policies learned entirely from a neural network simulator, removing hand-coded rules from the loop.
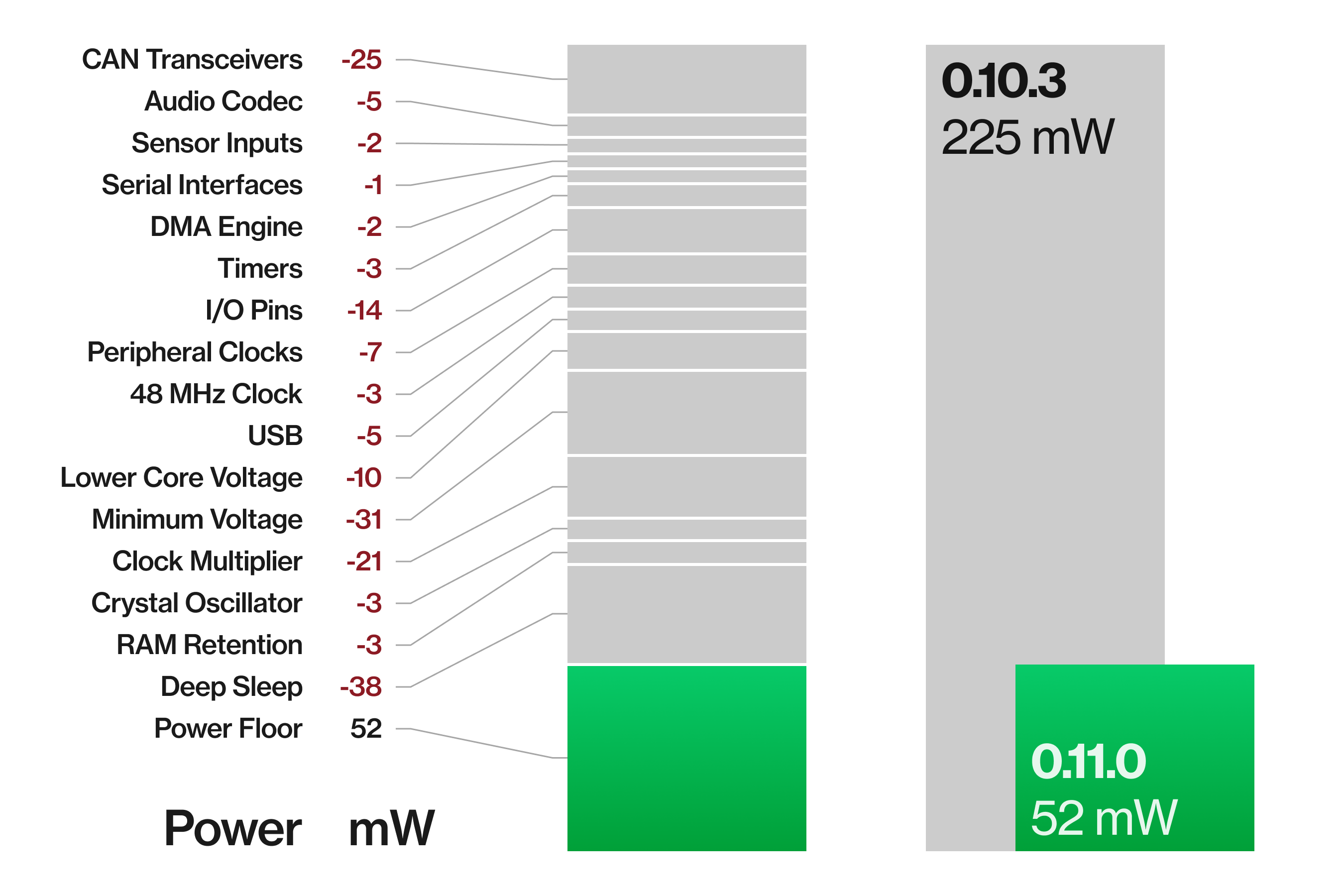
comma four gets a major quality-of-life improvement in 0.11. Idle power draw while parked and waiting for ignition drops from 225 mW to 52 mW, which is a 77% reduction.
Previously, the device consumed a meaningful chunk of the car's key-off power budget. At 52 mW, that parked drain is now effectively negligible for most owners.